Arten von Elektromotoren: Unterschied zwischen den Versionen
| Zeile 32: | Zeile 32: | ||
== Synchronmaschine == | == Synchronmaschine == | ||
| + | [[Datei:Aufbau_Synchronmaschine.jpg|mini|Abbildung 3: Funktionsweise einer Synchronmaschine]] | ||
Bei der Synchronmaschine wird im Gegensatz zur Asynchronmaschine das Läuferfeld nicht durch Induktion erzeugt. Bei kleineren Antrieben wird der Läufer mit Permanentmagneten versehen, bei größeren Maschinen werden Erregerwicklungen, vergleichbar denen der oben beschriebenen Gleichstrommaschine eingesetzt. Der Läufer dreht sich bei dieser Motorvariante synchron mit dem Drehfeld, woraus sich der Name des Motortyps ableitet. Die Erregerwicklungen werden dabei über Schleifkontakte mit Strom versorgt, wodurch ein gewisser Verschleiß und damit Wartungsaufwand entsteht. Gleichzeitig wird hierdurch der Aufbau im Gegensatz zur Asynchronmaschine komplexer und aufwändiger. Aufgrund dieser Tatsache wird der Asynchronmotor im Bereich der Antriebstechnik bevorzugt eingesetzt. Der Wirkungsgrad der Synchronmaschine liegt aufgrund der synchronen Strom- und Spannungsphasen über dem der Asynchronmaschine [3]. | Bei der Synchronmaschine wird im Gegensatz zur Asynchronmaschine das Läuferfeld nicht durch Induktion erzeugt. Bei kleineren Antrieben wird der Läufer mit Permanentmagneten versehen, bei größeren Maschinen werden Erregerwicklungen, vergleichbar denen der oben beschriebenen Gleichstrommaschine eingesetzt. Der Läufer dreht sich bei dieser Motorvariante synchron mit dem Drehfeld, woraus sich der Name des Motortyps ableitet. Die Erregerwicklungen werden dabei über Schleifkontakte mit Strom versorgt, wodurch ein gewisser Verschleiß und damit Wartungsaufwand entsteht. Gleichzeitig wird hierdurch der Aufbau im Gegensatz zur Asynchronmaschine komplexer und aufwändiger. Aufgrund dieser Tatsache wird der Asynchronmotor im Bereich der Antriebstechnik bevorzugt eingesetzt. Der Wirkungsgrad der Synchronmaschine liegt aufgrund der synchronen Strom- und Spannungsphasen über dem der Asynchronmaschine [3]. | ||
| − | |||
| − | |||
| − | |||
Vorteil der Synchronmaschine ist ihr sehr hoher Wirkungsgrad, die große Leistungsdichte und die hohen möglichen Drehzahlen, welche ein Getriebe überflüssig machen. Allerdings brauchen diese Maschinen Hochleistungsmagnete, welche verhältnismäßig viel seltene Erden benötigen. Denn trotz der zurzeit extrem hohen Werkstoffpreise für diese Magnete gibt es keine Alternative, wenn Leistungsdichte das Hauptkriterium ist. Falls doch aus Kostengründen vom Einsatz der NdFeB-Magneten abgesehen werden soll, können Kompromisse bei Leistungsdichte und Wirkungsgrad gemacht werden [1]. | Vorteil der Synchronmaschine ist ihr sehr hoher Wirkungsgrad, die große Leistungsdichte und die hohen möglichen Drehzahlen, welche ein Getriebe überflüssig machen. Allerdings brauchen diese Maschinen Hochleistungsmagnete, welche verhältnismäßig viel seltene Erden benötigen. Denn trotz der zurzeit extrem hohen Werkstoffpreise für diese Magnete gibt es keine Alternative, wenn Leistungsdichte das Hauptkriterium ist. Falls doch aus Kostengründen vom Einsatz der NdFeB-Magneten abgesehen werden soll, können Kompromisse bei Leistungsdichte und Wirkungsgrad gemacht werden [1]. | ||
| Zeile 43: | Zeile 41: | ||
== Reluktanzmaschine == | == Reluktanzmaschine == | ||
| + | [[Datei:Funktion_Reluktanzmotor.jpg|mini|Abbildung 4: Funktionsweise des Reluktanzmotors]] | ||
Auch wenn Reluktanzmotoren erst in den letzten Jahrzehnten zum weitverbreiteten Einsatz kam, so ist seine Technik dennoch sehr simpel. Die grundsätzliche Funktionsweise zeigt Abbildung 5 [5]. Grundsätzlich lassen sich bei dieser Art von Motoren die Transversalflussmaschine und der geschaltete Reluktanzmotor unterscheiden, auf was hier allerdings nicht weiter eingegangen wird. Bei einem Reluktanzmotor besitzen Rotor und Stator ein zahnförmiges Profil. Die Statorzähne sind jeweils mit Spulen bestückt, die abwechselnd ein und ausgeschaltet werden. Der Rotor besteht aus einem weichmagnetischen Material, bei dieser Bauart werden also keine Permanentmagneten eingesetzt. Im Ständer werden mehrere, gegenüberliegende Wicklungen eingebracht, die der Erzeugung eines Magnetfelds dienen. Diese Wicklungen werden dabei paarweise zu Strängen zusammengefasst. Das Drehmoment wird bei der geschalteten Reluktanzmaschine durch das abwechselnde Beschalten der Stränge im Stator erzeugt. Das entstehende Feld wirkt auf die Zähne des Rotors, so dass sich dieser relativ zum Strang bewegt. Erreicht er die Strangposition, wird der nächste Strang beschaltet, was den Läufer ein weiteres Stück dreht [3]. | Auch wenn Reluktanzmotoren erst in den letzten Jahrzehnten zum weitverbreiteten Einsatz kam, so ist seine Technik dennoch sehr simpel. Die grundsätzliche Funktionsweise zeigt Abbildung 5 [5]. Grundsätzlich lassen sich bei dieser Art von Motoren die Transversalflussmaschine und der geschaltete Reluktanzmotor unterscheiden, auf was hier allerdings nicht weiter eingegangen wird. Bei einem Reluktanzmotor besitzen Rotor und Stator ein zahnförmiges Profil. Die Statorzähne sind jeweils mit Spulen bestückt, die abwechselnd ein und ausgeschaltet werden. Der Rotor besteht aus einem weichmagnetischen Material, bei dieser Bauart werden also keine Permanentmagneten eingesetzt. Im Ständer werden mehrere, gegenüberliegende Wicklungen eingebracht, die der Erzeugung eines Magnetfelds dienen. Diese Wicklungen werden dabei paarweise zu Strängen zusammengefasst. Das Drehmoment wird bei der geschalteten Reluktanzmaschine durch das abwechselnde Beschalten der Stränge im Stator erzeugt. Das entstehende Feld wirkt auf die Zähne des Rotors, so dass sich dieser relativ zum Strang bewegt. Erreicht er die Strangposition, wird der nächste Strang beschaltet, was den Läufer ein weiteres Stück dreht [3]. | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
Der große Verteil der Reluktanzmaschine ist der robuste und einfache Aufbau ohne Rotorwicklung und Permanentmagneten. Aus diesem Grund benötigt diese Art von Elektromotor keine seltenen Erden und könnte daher ein wichtiger Bestandteil zukünftiger Elektromobilitätskonzepte werden. Die Motoren sind zudem relativ kompakt und lassen sich daher auch als Radnabenmotoren einsetzen. Nachteilig ist derzeit noch ihre hohe Geräuschentwicklung was bei hohen Drehzahlen durchaus unangenehm für den Fahren werden kann, als auch ihre niedrige Leistungsdichte [1]. | Der große Verteil der Reluktanzmaschine ist der robuste und einfache Aufbau ohne Rotorwicklung und Permanentmagneten. Aus diesem Grund benötigt diese Art von Elektromotor keine seltenen Erden und könnte daher ein wichtiger Bestandteil zukünftiger Elektromobilitätskonzepte werden. Die Motoren sind zudem relativ kompakt und lassen sich daher auch als Radnabenmotoren einsetzen. Nachteilig ist derzeit noch ihre hohe Geräuschentwicklung was bei hohen Drehzahlen durchaus unangenehm für den Fahren werden kann, als auch ihre niedrige Leistungsdichte [1]. | ||
Version vom 23. Januar 2014, 21:01 Uhr
Gleichstrommotoren
Die am einfachsten zu beschreibende Funktionsweise von Elektromotoren ist diejenige der Gleichstrommotoren. Ein Rotor, auch als Anker bezeichnet, ist von einer Spule umwickelt, um die sich bei Anschluss einer Gleichstromquelle ein magnetisches Feld ausbildet. Der Rotor ist von einem Permanentmagneten umgeben, der dauerhaft ein magnetisches Feld erzeugt und auch als Stator bezeichnet wird. Die Drehung des Rotors in dem magnetischen Feld lässt sich durch das physikalische Gesetz erklären, dass sich gegennamige Ladungen anziehen, während sich gleichnamige Ladungen abstoßen. Wie in Abbildung 1 dargestellt ist, wird der Gleichstrom über sogenannte Bürsten in die Spule geleitet. Je nach Stellung bzw. Position des Rotors sind die beiden Seiten des Rotors unterschiedlich gepolt. Aufgrund der Anziehung gegensätzlicher Pole dreht sich der Rotor in Stellung 1 gegen den Uhrzeigersinn, so dass die Bürsten kurzzeitig über einen Bereich laufen, über den kein Strom in die Spule geleitet werden kann. Über den Kommutator erfolgt eine Ladungsumkehr, so dass die beiden Seiten des Rotors nun über den jeweils anderen Pol der Batterie mit Strom versorgt werden, wodurch sich das von der Spule erzeugte Magnetfeld umkehrt und sich der Rotor erneut im Magnetfeld des Permanentmagneten ausrichtet. Die Drehung wird also dadurch erzeugt, dass sich ein wechselndes Magnetfeld in einem konstanten Magnetfeld ausrichtet. Auf diese Wechselwirkung beruhen die Funktionsweisen aller Elektromotoren. [4]
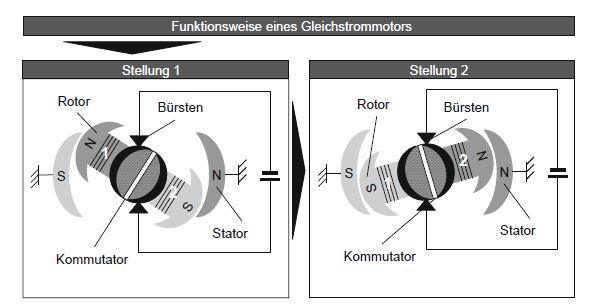

Abbildung 1: Funktionsweise eines Gleichstrommotors
Gleichstrommaschinen haben heute in der Elektromobilität nahezu keinen Einsatz mehr, zumindest nicht als Primärantrieb [1]. Grund hierfür ist vor allem die schlechte Wärmeabfuhr, da die gesamte Wärme im rotierenden Rotor entsteht und daher nur schwer abgeführt werden kann. In den darauffolgend beschriebenen Motoren entsteht der Wärmeverlust vor Allem im stillstehenden Stator, welcher einfach und günstig durch Luft oder Kühlmittel gekühlt werden kann [5].
Asynchronmaschine
Für den Betrieb der Asynchronmaschine wird ein Dreiphasenwechselstrom benötigt. Dieser auch als Drehstrom bezeichnete Strom setzt sich aus drei Phasen zusammen, die jeweils um 120° zueinander verschoben sind. Die Spannung der einzelnen Phasen verläuft wie beim Wechselstrom sinusförmig. Da die im Kraftfahrzeug mitgeführten Stromquellen ausschließlich Gleichstrom zur Verfügung stellen können, muss der Drehstrom erst über eine entsprechende Leistungselektronik erzeugt werden. Die folgende Abbildung 2 zeigt den prinzipiellen Aufbau einer Asynchronmaschine.
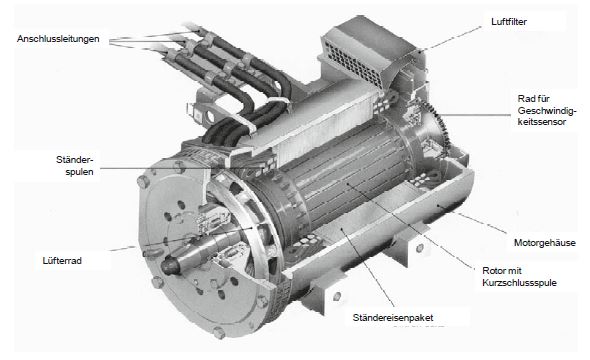

Abbildung 2: Aufbau einer Asynchronmaschine
Im Ständer einer Asynchronmaschine werden um 120° versetzte Wicklungen eingelassen, die über jeweils eine Phase des Drehstroms versorgt werden. Im Umfang des Läufers befinden sich kurzgeschlossene Wicklungen. Das über die Ständerwicklungen erzeugte, umlaufende Magnetfeld induziert in den Läuferwicklungen eine Spannung, woraus sich innerhalb der Läuferwicklungen ein Stromfluss ergibt. Die nun stromdurchflossenen Leiter im Läufer erfahren durch das magnetische Drehfeld eine Kraft, die den Läufer in Richtung des Drehfeldes in Bewegung versetzt. Zur Änderung der Drehrichtung des Motors muss die Umlaufrichtung des Ständermagnetfeldes angepasst werden. Aufgrund der fehlenden Kommutierung sind im Vergleich zum Gleichstrommotor deutlich höhere Drehzahlen realisierbar, so können Asynchronmotoren mit Drehzahlen bis zu 14.000 min–1 betrieben werden. Der Name des Asynchronmotors ist darauf zurückzuführen, dass die erreichte Umfangsgeschwindigkeit des Läufers niemals die vom Drehstrom erzeugte Umfangsgeschwindigkeit des Magnetfelds erreichen kann, sondern aufgrund von Schlupf immer kleiner ist. Besteht keine Relativgeschwindigkeit mehr zwischen Läufer und Drehfeld, wird in den kurzgeschlossenen Läuferwicklungen keine Spannung mehr induziert und der Stromfluss kommt zum Erliegen. Ohne den Stromfluss in den Läuferwicklungen kann kein Drehmoment erzeugt werden. Für diesen Motor ist auch die Bezeichnung Induktionsmotor üblich, da die in den Läuferwicklungen induzierte Spannung maßgeblich zur Funktion des Motors beiträgt [3]. Da Asynchronmotoren in allen Bereichen der Industrie weit verbreitet sind, sind deren Anschaffungskosten auf Grund der hohen Produktionsmenge entsprechend gering und ihre Technik ist auch für den mobilen Bereich ausgereift [5]. Nachteilig ist der schlechtere Wirkungsgrad im Vergleich zum Gleichstrommotor und die geringere Leistungsdichte im niedrigeren Lastbereich. Diese Motoren sind daher nur bedingt als Direktantriebe geeignet. Zusätzlich benötigen leistungsstarke Asynchronmaschinen Magnete in ihrer Erregerwicklung mit einem gewissen Anteil an seltenen Erden um Gewicht zu sparen und die Leistung zu optimieren [1].
Synchronmaschine

Bei der Synchronmaschine wird im Gegensatz zur Asynchronmaschine das Läuferfeld nicht durch Induktion erzeugt. Bei kleineren Antrieben wird der Läufer mit Permanentmagneten versehen, bei größeren Maschinen werden Erregerwicklungen, vergleichbar denen der oben beschriebenen Gleichstrommaschine eingesetzt. Der Läufer dreht sich bei dieser Motorvariante synchron mit dem Drehfeld, woraus sich der Name des Motortyps ableitet. Die Erregerwicklungen werden dabei über Schleifkontakte mit Strom versorgt, wodurch ein gewisser Verschleiß und damit Wartungsaufwand entsteht. Gleichzeitig wird hierdurch der Aufbau im Gegensatz zur Asynchronmaschine komplexer und aufwändiger. Aufgrund dieser Tatsache wird der Asynchronmotor im Bereich der Antriebstechnik bevorzugt eingesetzt. Der Wirkungsgrad der Synchronmaschine liegt aufgrund der synchronen Strom- und Spannungsphasen über dem der Asynchronmaschine [3].
Vorteil der Synchronmaschine ist ihr sehr hoher Wirkungsgrad, die große Leistungsdichte und die hohen möglichen Drehzahlen, welche ein Getriebe überflüssig machen. Allerdings brauchen diese Maschinen Hochleistungsmagnete, welche verhältnismäßig viel seltene Erden benötigen. Denn trotz der zurzeit extrem hohen Werkstoffpreise für diese Magnete gibt es keine Alternative, wenn Leistungsdichte das Hauptkriterium ist. Falls doch aus Kostengründen vom Einsatz der NdFeB-Magneten abgesehen werden soll, können Kompromisse bei Leistungsdichte und Wirkungsgrad gemacht werden [1].
Reluktanzmaschine

Auch wenn Reluktanzmotoren erst in den letzten Jahrzehnten zum weitverbreiteten Einsatz kam, so ist seine Technik dennoch sehr simpel. Die grundsätzliche Funktionsweise zeigt Abbildung 5 [5]. Grundsätzlich lassen sich bei dieser Art von Motoren die Transversalflussmaschine und der geschaltete Reluktanzmotor unterscheiden, auf was hier allerdings nicht weiter eingegangen wird. Bei einem Reluktanzmotor besitzen Rotor und Stator ein zahnförmiges Profil. Die Statorzähne sind jeweils mit Spulen bestückt, die abwechselnd ein und ausgeschaltet werden. Der Rotor besteht aus einem weichmagnetischen Material, bei dieser Bauart werden also keine Permanentmagneten eingesetzt. Im Ständer werden mehrere, gegenüberliegende Wicklungen eingebracht, die der Erzeugung eines Magnetfelds dienen. Diese Wicklungen werden dabei paarweise zu Strängen zusammengefasst. Das Drehmoment wird bei der geschalteten Reluktanzmaschine durch das abwechselnde Beschalten der Stränge im Stator erzeugt. Das entstehende Feld wirkt auf die Zähne des Rotors, so dass sich dieser relativ zum Strang bewegt. Erreicht er die Strangposition, wird der nächste Strang beschaltet, was den Läufer ein weiteres Stück dreht [3].
Der große Verteil der Reluktanzmaschine ist der robuste und einfache Aufbau ohne Rotorwicklung und Permanentmagneten. Aus diesem Grund benötigt diese Art von Elektromotor keine seltenen Erden und könnte daher ein wichtiger Bestandteil zukünftiger Elektromobilitätskonzepte werden. Die Motoren sind zudem relativ kompakt und lassen sich daher auch als Radnabenmotoren einsetzen. Nachteilig ist derzeit noch ihre hohe Geräuschentwicklung was bei hohen Drehzahlen durchaus unangenehm für den Fahren werden kann, als auch ihre niedrige Leistungsdichte [1].
Zusammenfassung Elektromotoren
Zusammenfassend lassen sich also folgende Eigenschaften der unterschiedlichen, für den automobilen Einsatz geeigneten, Elektromaschinen festhalten: